پروژه بررسی و شبیه سازی درایو موتور القایی و رفتار آن تحت شرایط کاهش ولتاژ
فرمت فایل دانلودی: .rarفرمت فایل اصلی: docx
تعداد صفحات: 110
حجم فایل: 1052
قیمت: : 50000 تومان
بخشی از متن:
بخشی از مقدمه:
در اغلب بخشهای صنعتی، انرژی الکتریکی از مهمترین منابع انرژی به شمار میرود. امروزه در صنعت، ماشینهای متفاوت و با سرعت های مختلف مورد استفاده قرار می گیرد که موارد قابل ذکر عبارتند از: ماشین برش فلزات، جرثقیل الکتریکی، ماشینهای مربوط به حمل و نقل و انواع مختلف وسایل چاپ، معدن ذغال سنگ و صنایع دیگر .برای مثال در چرخاننده الکتریکی در ماشین برش فلزات، سرعت سیستم میباید مطابق با نوع کار، فلز و کیفیت نوع برش و اندازه قطعه مورد نظر، قابل تنظیم باشد. از آنجا که موتورهای الکتریکی مصرفکننده اصلی انرژی در کارخانجات صنعتی هستند، لذا بهینهسازی مصرف در این موتورها به عنوان گزینهای اساسی در ارتباط با صرفه جویی انرژی، قابل بررسی میباشد. در کلیه ماشین آلات ذکر شده، چرخاننده باید مجهز به کنترل سرعت باشد تا بتواند کمیت تولید زیاد، شرایط کار مطلوب و کیفیت محصول خوب باشد. توسط کنترل سرعت می توان سرعت چرخاننده را به میزان مورد نیاز جهت انجام مراحل کار تغییر داد. مفهوم کنترل سرعت یا تنظیم نباید شامل تغییر طبیعی در هنگام اخذ بار شود. تغییر سرعت مورد نیاز در روی موتور چرخاننده و یا عنصر مرتبط به موتور چرخاننده انجام میگیرد، که ممکن است این عمل با دست توسط اپراتور و یا به طور اتوماتیک توسط وسایل کنترل انجام گیرد. امروزه تنظیم سرعت توسط مدار الکتریکی توسعه یافته و از نظر اقتصادی و نتایج حاصله بر کنترل مکانیکی ارجعیت دارد.
یکی از راههای فوق العاده مؤثر در کاهش مصرف این تجهیزات، استفاده از درایو یا کنترل کنندههای دور موتور است.
فهرست مطالب:
فصل اول: مقدمه
فصل دوم: موتورهای الکتریکی
فصل سوم: اصول اولیه موتور القایی سه فاز
3-1- ساختمان موتورهای سه فاز
3-1-1- استاتور
3-1-2- روتور
3-1-2-1- روتور قفس سنجابی
3-1-2-2- روتور سیم بندی شده
3-2- تئوری ماشین های سه فاز
3-3- راه اندازی
3-4- کنترل سرعت
فصل چهارم: کنترل کننده های دور موتور
4-1- مزایای استفاده از کنترل کننده های دور موتور
4-2- بخشی از کاربری درایوهای موتور AC و DC
4-3-کلیات
4-4- ساختمان قسمت قدرت درایوهای AC
4-5-کنترل برداری
فصل پنجم: کنترل موتور القایی به روش برداری FOC
5-1- مبانی الگوریتم کنترل برداری به روش FOC با سنسور موقعیت
5-2- بخش قدرت
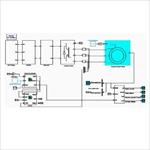
فصل ششم: شبیه سازی
فصل هفتم: نتیجه گیری و پیشنهادات
منابع و مآخذ
 پرداخت با کلیه کارتهای عضو شتاب امکان پذیر است.
پرداخت با کلیه کارتهای عضو شتاب امکان پذیر است.